CARRO EVASOR DE OBSTÁCULOS
OBJETIVOS
- Verificar la conexión del sensor ultrasonico del carro ELEGOO utilizando el manual.
- Entender el principio de funcionamiento del sensor ultrasonico.
- Realizar la programación para el sensor ultrasonico detecte a los objetos y el caro cambie de dirección.
MARCO TEÓRICO
Carro ELEGOO: Es un kit educativo para principiantes para obtener experiencia práctica sobre la programación de Arduino, ensamblaje de componentes electrónicos y conocimiento de robótica. Es una solución de integración para el aprendizaje de la robótica y está hecha para la educación Arduino
Tiene más de 10 actualizaciones: como el sensor remoto IR integrado en la placa, 3 módulos de seguimiento de línea en una placa, también se puede instalar sensores adicionales en la misma placa de extensión
VISTA CARRO ELEGOO

ACCESORIOS DEL CARRO ELEGOO

SENSOR ULTRASONICO
El sensor ultrasónicos es un tipo de sensor acústico, el sensor emite un sonido y mide el tiempo que la señal tarda en regresar. Estos reflejan en un objeto, el sensor recibe el eco producido y lo convierte en señales eléctricas.


El sensor ultrasónicos es un tipo de sensor acústico, el sensor emite un sonido y mide el tiempo que la señal tarda en regresar. Estos reflejan en un objeto, el sensor recibe el eco producido y lo convierte en señales eléctricas.

CARACTERÍSTICAS
• Voltaje de Funcionamiento: 5V
(DC)
• Corriente Stand By: <2 mA
• Consumo en Funcionamiento: 15mA
• Frecuencia de Funcionamiento:
40KHz
• Señal de salida: Tren de Pulsos,
nivel alto a 5V, nivel bajo a 0V
• Ángulo Eficaz de Detección: <
15°
• Distancia de Detección: 2 – 450
cm
• Resolución: 0,3 cm
• Señal de Entrada para Disparo
(Trigger): TTL pulso 10us
• Señal de Salida para Eco (Echo)
a: Señal PWL de TTL
CONEXIÓN DEL SENSOR ULTRASÓNICO CON EL ARDUINO

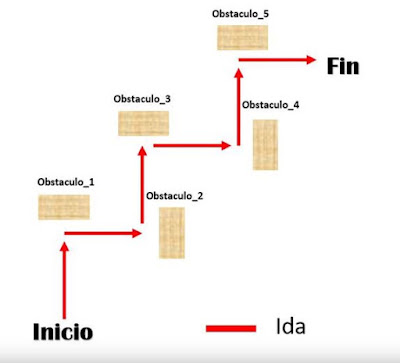
TRAYECTORIA

PROGRAMA REALIZADO
VIDEO GENERAL
VIDEO EXPLICACIÓN DEL SOFTWARE
OBSERVACIONES
- El sensor ultrasónico que contiene el robot tiene dos señales, una que emite y otra que recepciona los cuales son llamadas con las letras T(emisor) y R(receptor).
- Para realizar un cambio en la velocidad a la que avanza el motor debemos crear una variable y darle un numero como máximo 250.
- Para calcular la distancia que debe medir el sensor ultrasónico debemos usar la siguiente formula L = ½ * T * C donde L es la distancia a la cual queremos que el objeto sea detectado, T es el tiempo que demorara en hacerlo y C es la velocidad del sonido que es de 343.2 m/s esta ecuación es multiplicada por ½ ya que representa el tiempo de emisión y de recepción.
CONCLUSIONES
- Se realizó un programa evasor de obstáculos en el cual tenemos que usar el sensor ultrasónico para cumplir con una secuencia de obstáculos puestos en el camino que debe recorrer.
- Se creó una nueva variable llamada “ABS” a la cual le dimos un valor de 130, esta variable regula la velocidad a la cual el carro avanza.
- En la instrucción “void setup” declaramos la variable Echo como entrada, las variables in, ENA, ENB y trig como salidas.
- El void “_mForward” hace que el carro vaya hacia adelante en la cual habilitamos la variable de velocidad y los ENA Y ENB.
- La subrutina void “_mleft” hace que el carro gire hacia la izquierda pero solo sobre su eje, esto puede ser modificado dándole un tiempo limitado de giro para evadir los objetos que tenga enfrente.
- La subrutina void “_mright” le permite al carro girar hacia la derecha, esta instrucción se utilizó para evadir un objeto siguiendo una secuencia de giros
- Creamos una instrucción llamada “_stop” que apaga todas los habilitadores “ENA-ENB”, esto con el fin de detener el carro por un pequeño tiempo cuando este frente a un objeto.
- En cada subrutina utilizada se habilito la variable de velocidad para que cada movimiento del carro sea uniforme.
- Para realizar la secuencia de giro primero a la derecha y luego hacia la izquierda se creó una variable para que cumpla esa secuencia y el carro haga un recorrido en forma de grada.
- La distancia que debe medir el sensor ultrasonico es de 20 centimetros para luego detenerse y girar hacia otra direccion.
- El sensor ultrasónico debe medir la distancia a la cual se encuentra el objeto para ello tenemos la instrucción “Distance_test” que como dice su nombre hace un test de distancia la cual podemos darle un valor utilizando el comando “IF - ELSE” el cual nos permite hacer el test solo cuando haya un objeto adelante y si no hay ningún obstáculo el carro avanza hacia adelante.
INTEGRANTES
- Mendiola Espinoza Gilmar Jose
- Ticona Condori Nicol Stephanie

No hay comentarios:
Publicar un comentario